Multi-state flexibility function for multi-sector energy systems
coming soon …
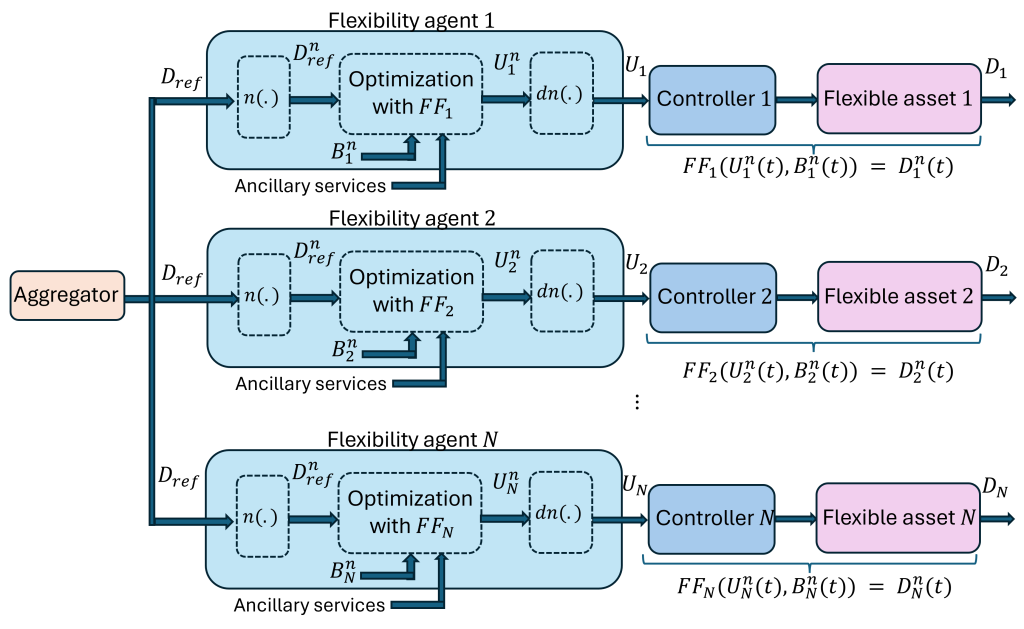
Hierarchical control framework for load shaping of fleet of flexible assets
In this work, we present a hierarchical, grid-aware control framework for load shaping through price-based demand-side management, enabling real-time coordination between grid-level objectives and local operations with minimal communication. The proposed hierarchical architecture consists of flexibility agents, which mediate between the aggregator and local controllers by generating optimal signals. Using dynamic models that characterize the relationship between the price signal and the demand of flexible assets, an optimization algorithm is implemented at the flexibility agent level to determine price signals that ensure the aggregate demand follows the purchased demand. This configuration can shape the demand by requiring information about the aggregated reference demand, without accessing the demand of individual flexible assets.
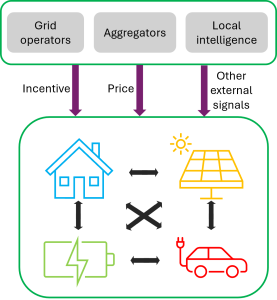
FlexibleCommunity simulator
In this work, we introduce FlexibleCommunity, an incentive-based energy management simulator for investigating demand-response strategies of communities and generating high-resolution datasets capturing both explicit and implicit participation. The simulator can be configured to represent an arbitrary number of buildings, enabling scalable modeling of communities with heterogeneous dwellings equipped with price-responsive heating systems of varying types and capacities. It also integrates photovoltaic (PV) systems, electric vehicles (EVs), and battery storage to represent multiple flexibility mechanisms. FlexibleCommunity includes stochastic occupant behavior to improve realism and capture uncertainty in energy use patterns. The generated datasets contain time-series data on energy consumption, price signals, weather conditions, and solar irradiance, supporting applications such as load forecasting and flexibility assessment.
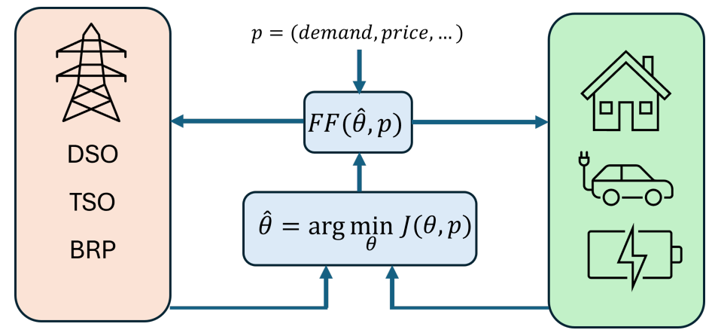
Flexibility function recursive estimation
In this work, we developed an adaptive digital twin that presents time-varying demand as a function of electricity price. Recursive optimal parameter estimation techniques are utilized to find the parameters of flexibility function. The recursive flexibility function can then be used as a link to different levels of hierarchy in smart energy OS, for demand side management and providing the required ancillary services.
Incentive-based control of energy systems
An incentive-based controller for demand response in building energy systems is an advanced control strategy that optimizes energy usage based on price signals. By integrating predictive models of building energy consumption, thermal dynamics, and occupant behavior, the MPC can anticipate future energy needs and adjust HVAC systems. The controller responds dynamically to price fluctuations, shifting or reducing energy use during peak pricing periods to minimize costs while maintaining comfort and operational efficiency. This approach enhances energy flexibility, supports grid stability, and enables buildings to participate in demand response programs, helping to balance supply and demand in modern energy markets.
Adaptive model predictive controller for building thermal dyanmics
While non-adaptive Model Predictive Controllers have shown promise in optimizing building energy management, they often fall short due to their inability to handle uncertainties, dynamic changes, and reliance on expensive, accurate models. On the other hand, machine learning approaches can tackle these issues but require extensive data, computational power, and a model for learning control policies. The development of an adaptive MPC, which combines the benefits of traditional MPCs and machine learning techniques. Our approach can account for system parameter deviations and constraints using a linear grey-box model of thermal dynamics.
Stability analysis of flexibility function
Flexibility function as a nonlinear and stochastic dynamical system is introduced to represent the price-demand relationship in a price-responsive energy system. This dynamic function is going to become a core for decision-making at different levels of the hierarchy of controllers in the smart energy operating system (OS). Therefore, the widespread usage of this dynamic system pops up the need for a stability analysis.
Adaptive model predictive control of building thermal dynamics
Model predictive controllers have been shown to be efficient for the control of energy and thermal systems. However, most existing approaches assume that the model is constant. In addition, the process of developing a precise model for MPC can be time-consuming and costly. This inspired us to propose an adaptive MPC that utilizes a simple linear nominal model of the thermal dynamics and is capable of identifying the changes in the system and accommodating the model for the MPC. Lyapunov’s stability theorem is provided to guarantee the convergence and stability of the identification and adaptive MPC, respectively.
Optimal price signal generation
Finding an optimal price (penalty) signal for MPC for demand-side management is a requirement in many energy systems. Currently, this signal is prespecified based on a general pattern of electricity price changes in each region. However, employing the flexibility function provides the opportunity to connect different levels of control hierarchy such as the electricity market and aggregators. In this work, we investigate different optimization algorithms to provide a penalty signal using the reference demand provided by an aggregator. This approach can also be used for ancillary services in power systems.
Adaptive flexibility function
The flexibility function is a nonlinear mapping between the energy price and demand. It can be employed in smart energy systems to generate price signals for MPCs for demand shifting and consumption scheduling. However, energy-flexible systems may change and consequently, a modified flexibility function is required. To this end, we proposed an adaptive flexibility function capable of identifying the changes and adapting the flexibility function. The proposed approach is based on the Lyapunov stability theorem and guarantees stability, boundedness, and convergence of the overall system.
From white-box to grey-box modelling (stochastic system identification)
High quality models, which are able to predict the future evolutions are required for the advanced model-based control implementation. Although, white-box modelling is a common method to simulate and provide an in-detail description of dynamics, it is not a proper candidate for the controller design due to its complexity and high-dimensionality, and the requirement for various information about the systems. Grey-box models, on the other hand, consists of a set of stochastic differential equations (SDEs), describing the dynamics of the system, and allowing incorporation of prior physical knowledge and utilization of statistical methods for parameter estimation. We have introduced a procedure for finding grey-box models of thermal dynamics of a buildings from the white-box data.
Sliding mode controller for constraint systems with redundancy
Sliding mode controllers are well-known control approaches to provide robustness in nonlinear dynamical systems. However, considering actuator constraints in sliding mode controller design is not a simple task compare to the optimization-based control approaches. The design procedure gets more complicated in the presence of multi-inputs. This study proposes a time-varying sliding mode controller for over-actuated systems with constrained and uncertain actuators. By design, the initial point of the trajectories start on the proposed sliding surface. Also, the proposed controller keeps the trajectories on this surface.
Actuator constraints such as magnitude and rate limits play a prominent role in advanced control systems. These limits induce nonlinear behavior which may lead to performance degradation, occurrence of limit cycles, multiple equilibria, and even instability. In this research, we proposed a solution to handle actuator’s magnitude and rate constraints in uncertain over-actuated systems. This is done by introducing a modified projection algorithm. In addition, the properties of this new algorithm required for ensuring stability and boundedness of the signals are proved. This algorithm can also be employed for adaptive control systems.
Unique abilities of humans such as adaptive behavior in dynamic environments, social interaction, and moral judgment capabilities, make humans essential elements of many control loops, operating in close collaboration with autonomy. Investigation of human in the loop dynamics helps develop safe control mechanisms and provide a better realization and understanding of human control actions and limitations.
Most existing human models do not consider human adaptive behavior. Inspired by humans’ ability to adapt to changing environments, the proposed adaptive human model mimics this ability despite input bandwidth deviations and plant uncertainties. The proposed human pilot model structure is based on the model reference adaptive control, and the adaptive laws are obtained using the Lyapunov Krasovskii stability criteria. Experimental data show that the proposed model mimics human behavior in the presence of uncertainty.
Conventional control allocation methods distribute the total control effort among redundant actuators. These methods require identification techniques or persistent excitation assumption to handle actuator uncertainties. The proposed adaptive control allocation is able to distribute control signals among uncertain redundant actuators without any identification or assumptions on signals. Asymptotic stability of the proposed method is guaranteed.
Although optimization-based control allocation methods are able to handle the actuator constraints, their computational complexity is high, especially when the number of actuators increases. The proposed control allocation method uses the degrees of freedom provided by the null space of the control matrix and restricts the control signals in a fixed time slot.